Robotiser simplement ses systèmes de distribution de nourriture animale avec SICK
08/04/2020
Une société spécialisée dans la conception et la fabrication de solutions économiques pour l’élevage a réussi à robotiser ses machines en quelques mois grâce au système de localisation pour navigation autonome NAV-Loc de SICK
Que ce soit pour le mélange et la distribution de nourriture ou pour le fourrage, l’heure est à la robotisation des systèmes ! Cela permet de libérer un temps précieux pour les exploitants, d’améliorer de façon significative la qualité des conditions de vie des animaux avec des passages plus réguliers et plus nombreux pour assurer une fraîcheur maximale des produits mais aussi de réduire les pertes en adaptant au plus juste les quantités nécessaires. Le défi est de taille pour la majorité des fabricants de systèmes pour les exploitations agricoles.
La navigation autonome, une question de compétence
Ils doivent être en mesure de robotiser rapidement leurs systèmes mais bien souvent ils ne disposent pas de compétences approfondies dans le domaine très pointu de la navigation. Le temps pour y parvenir ainsi que les performances nécessaires pour des robots fiables et précis sont deux points cruciaux pour la réussite de ce type de projet. Voilà le challenge auquel s’est trouvé confronté une société vendéenne spécialisée dans la conception de systèmes pour l’élevage.
Comment rendre autonome des systèmes de distribution d’aliments pour l’élevage ?
Sa problématique était de pouvoir intégrer rapidement en option dans sa gamme de distributeurs d’aliments pour les ovins, caprins et bovins, des versions totalement autonomes identiques aux machines existantes tout en conservant la possibilité de conduite manuelle en cas de nécessité. En outre, ces systèmes devaient être faciles à installer, rapides à mettre en œuvre, adaptables aux exploitations existantes et le tout avec une forte contrainte sur la maîtrise des coûts.
Fort de ses 25 ans d’expérience dans le domaine des Lidars, SICK développe depuis plusieurs années des solutions de navigation prêtes à l’emploi qui peuvent s’intégrer très facilement aux machines mobiles existantes. Ces systèmes sont basés sur la technologie des Lidars et peuvent fonctionner selon deux principes différents :
1. Localisation par contours naturels
Fonctionnement sur contours naturels : Il n’est pas nécessaire de mettre en place des éléments spécifiques dans un bâtiment pour réaliser le guidage. Le système effectue ses mesures directement les éléments naturels comme les murs, barrières ou tout autre objets physiques fixes afin de se repérer dans l’espace et fournir les coordonnées de positionnement correspondantes.
2. Localisation sur réflecteur
Fonctionnement sur cibles coopératives : Ce principe nécessite l’utilisation de cibles réfléchissantes (réflecteurs), disposées à des emplacements spécifiques dans le bâtiment
Le choix de la technologie et de la gamme de produit adéquate se fait selon la configuration, l’environnement et les contraintes de l’application.
Le NAV-Loc, un système de localisation prêt à l’emploi pour automatiser la navigation
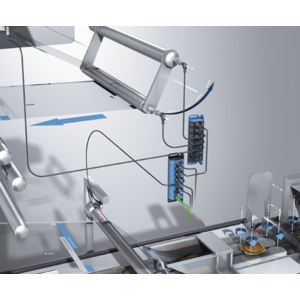
La mise en œuvre du système passe par une phase de cartographie de la zone dans laquelle devra évoluer le système robotisé. Selon la technologie, la cartographie se fera directement sur les contours naturels ou sur des cibles réfléchissantes disposées préalablement à des endroits prédéfinis. À l’issue de cette phase, l’espace dans lequel évoluera le robot sera sauvegardé et les informations de position en X, en Y et d’orientation seront calculées à partir des données du Lidar et transmise au dispositif Contrôle- Commande du robot avec une précision de l’ordre du centimètre.
Mise en application du système de localisation NAV-Loc chez le client
Notre client a tout de suite été séduit par ce type de solution à la fois simple à intégrer sur ses machines existantes, facile à mettre en œuvre et offrant un niveau de performance de haut niveau. Après une présentation des différentes technologies et gammes associées, un test a été rapidement décidé avec une version utilisant des cibles réfléchissantes.
Dans un esprit de partenariat, un matériel avec option d’achat été prêté dans un premier temps. Dès réception du matériel, la prise en main du système et sa mise en œuvre ont été réalisées avec une simple assistance téléphonique de nos experts, témoin de la facilité du système. En quelques semaines à peine, le robot a été opérationnel et autonome, prêt à être éprouvé sur une installation réelle.
Ensuite, la phase de validation s’est déroulée pendant plusieurs mois, afin de s’assurer de la performance du système et de garantir son comportement le temps. Cette phase In-Situ a été un véritable succès et a permis de valider définitivement le produit.
Quels étaient les points clés qui ont fait de la phase de test un succès ?
L’intégration de robots autonomes à l’offre de notre client est devenue réalité en moins d’un an, permettant de répondre ainsi à une demande forte du marché et à se positionner comme un acteur incontournable et un leader technologique du domaine.
Le NAV-Loc en quelques mots :
Le NAV LOC se compose d’un capteur 2D-LiDAR NAV310 qui fournit des données de balayage précises et qui sont traitées dans la version spéciale de la Sensor Integration Machine SIM2000ST grâce à un algorithme de SICK. Pendant le traitement, l’algorithme de SICK compare en permanence les distances issues des données de balayage actuelles avec la carte de référence et fournit ainsi la position actuelle et l’angle d’orientation du véhicule. Le NAV310 est le premier capteur 2D-LiDAR de SICK qui peut être utilisé pour ce genre de localisation de contours en combinaison avec le SIM2000ST. Dans un avenir proche, d’autres capteurs 2D-LiDAR pourront être intégrés au NAV-LOC.
Autres actualités SICK France










































Capteur photoélectrique miniature W4F
















Sensor Integration Machines SIM1012







































SICK: des chiffres records en 2016

Analyseurs d'oxygène ZIRKOR de SICK

Capteur de brillance Glare Sensor

Capteurs d’inclinaison TMM/TMSXX






Roue de mesure DBV50

SICK poursuit sa croissance en 2015



Capteur de vision 3D TriSpector1000


Barrage de sécurité deTec4 Prime




Codeur de sécurité DFS60S Pro

Détecteur de Brillance Glare


Détecteur de couleurs CSM de SICK


Portique de lecture RFID RFU620


Scrutateurs laser de sécurité SICK












Nouveau système de détection FLG


Analyseur de mercure MERCEM300Z

Capteur de positionnement DL HI 100









Capteur de position magnétique MPS



Nouveau système de Vision IDL



Capteur de niveau de remplissage UP56


Caméra de sécurité V300 WS Extended