Robot à bras multiples ATRO, le robot parfait pour chaque application
23/08/2023
Avec ATRO, Beckhoff présente un nouveau concept pour les applications robotiques. Il s'agit d'un système modulaire qui permet d'assembler la cinématique du robot de manière extrêmement flexible pour chaque application.
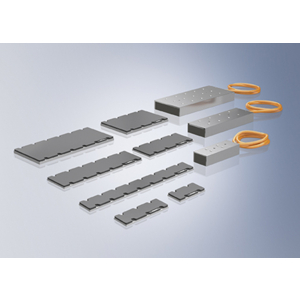
En tant que modules mécaniquement passifs, les modules de liaison ATRO sont utilisés pour adapter la structure cinématique, ou l'espace de travail, aux exigences des utilisateurs.
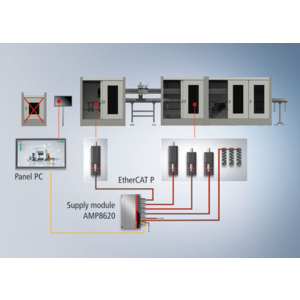
Avec ATRO, les utilisateurs peuvent créer quasiment toutes les conceptions de robot pour leur application à partir des modules fournis - d'une simple application sur table d'indexation rotative à 1 axe et cinématique delta, jusqu'aux robots articulés à plusieurs axes. La perspective globale de Beckhoff est décisive pour une mise en service et une manipulation simples, car seule l'intégration directe du système de robot dans la commande sur base PC permet d'obtenir une solution complète réellement optimisée pour la machine ou l'installation. Cela réduit le nombre de commandes nécessaires sur un PC industriel, même avec plusieurs robots.
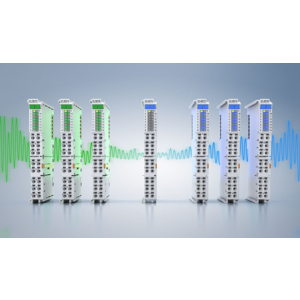
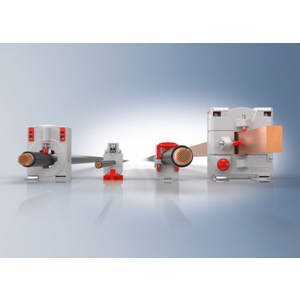
La cinématique d'ATRO est constituée d'articulations actives – les modules moteur. Différents modèles de modules moteur sont disponibles : modules droits en forme de I ou modules angulaires en forme de L, qui sont conçus en cinq gammes de puissance. Chaque module moteur forme un système d'entraînement complet pour un axe du robot. Les seuls composants externes nécessaires sont un bloc d'alimentation et une commande, ce qui réduit considérablement l'espace requis dans l'armoire de commande. Outre les modules actifs, il existe des modules de raccordement sans leur propre moteurs :
- Modules de base avec guide câble
- Modules de liaison avec des formes en I, L et Y pour des configurations individuelles
- Modules système qui peuvent être utilisés pour intégrer des fonctions supplémentaires telles qu'une caméra
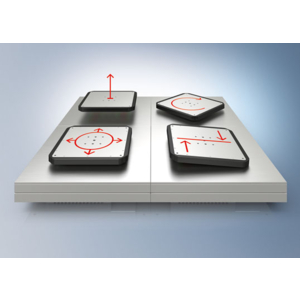
Les dernières nouveautés présentées comprennent un module de liaison en forme de T avec deux jonctions, ainsi que des modèles en forme de L et de S. Les nouveaux modules de liaison en L et en S prennent en charge des cinématiques à quatre degrés de liberté, qui peuvent être utilisées pour des tâches telles que la
palettisation
Tous les modules sont interconnectés via l'interface ATRO, qui garantit une connexion rigide et laisse également passer les supports médias introduits. Les données, l'alimentation et les fluides (air comprimé, vide ou eau) sont ainsi guidés en interne via les modules de la cinématique ATRO. Les solutions robotiques classiques les font passer par l'extérieur et sont donc limitées en termes de rotation et d'utilisation de l'espace de travail. La solution Beckhoff élimine complètement ce problème : chaque axe peut être tourné sans fin, ce qui permet une meilleure accessibilité et des chemins de positionnement plus courts.
Autres actualités Beckhoff Automation

























































Beckhoff lance TwinCAT HMI






Panel PC étanche CP37xx













Servomoteur inox AM8800












Beckhoff Automation Update


Servomoteurs inox AM8800

Ecrans tactiles MultiFinger















PC Embarqué CX8000