Moteurs électriques à courant continu sans balais avec interface EtherCAT
13/01/2011
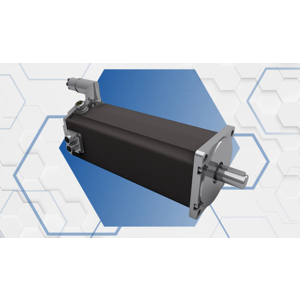
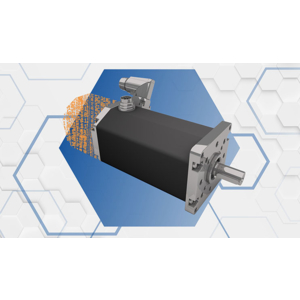
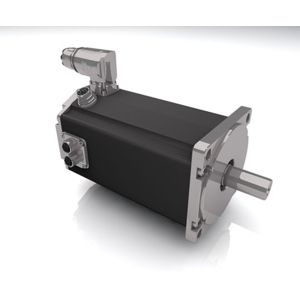
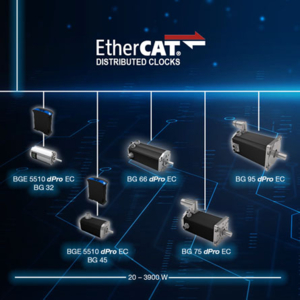
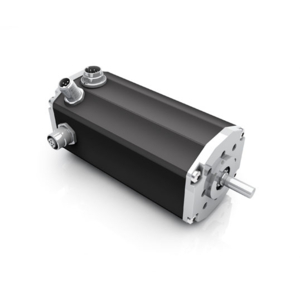
Outre une interface bus de terrain CANope, les servomoteurs Dunkermotoren de la famille BG qui couvrent une gamme de puissance allant de 40 à 500 watts, sont désormais proposés avec une interface EtherCAT
EtherCAT est une technologie de bus de terrain basé sur Ethernet qui répond aux exigences de temps réel les plus sévères et affiche actuellement le niveau de croissance le plus élevé en termes de noeuds installés dans les bus de terrain Ethernet pour les applications d´automatisation industrielles.
Grâce à la fonction CoE (CANopen sur EtherCAT), ces servomoteurs peuvent fonctionner en esclaves dans un réseau EtherCAT, en utilisant les mêmes objets que CANopen. Dunkermotoren fait appel à des objets standardisés DSP402 pour le positionnement, la supervision et la configuration des servo-entraînements.
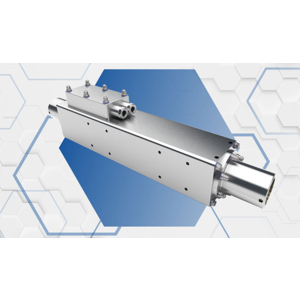
Dunkermotoren, distribué en France par MDP, fournit des solutions d´entraînement pertinentes pour une grande variété de domaines d´application. Les utilisateurs ont le choix parmi un large éventail de composants d´entraînement modulaires. Les constructeurs de machines sont ainsi en mesure de concevoir des entraînements parfaitement alignés et ajustés pour des exigences spécifiques.
Outre les moteurs électriques, Dunkermotoren propose une gamme étendue de réducteurs à engrenages planétaires et à vis sans fin, de freins et d´encodeurs dans un système modulaire bien conçu. Les constructeurs de machines qui travaillent en collaboration avec les spécialistes des systèmes d´entraînement de Dunkermotoren peuvent de cette manière assembler rapidement des configurations optimales d´entraînement à partir de composants standards avec un minimum d´efforts de conception.